Turtlebot4
|
Turtlebot4
|
|
|---|---|
 |
|
| Status: Active | |
Superusers
- Ivan Penskiy (ipenskiy@umd.edu)
Overview
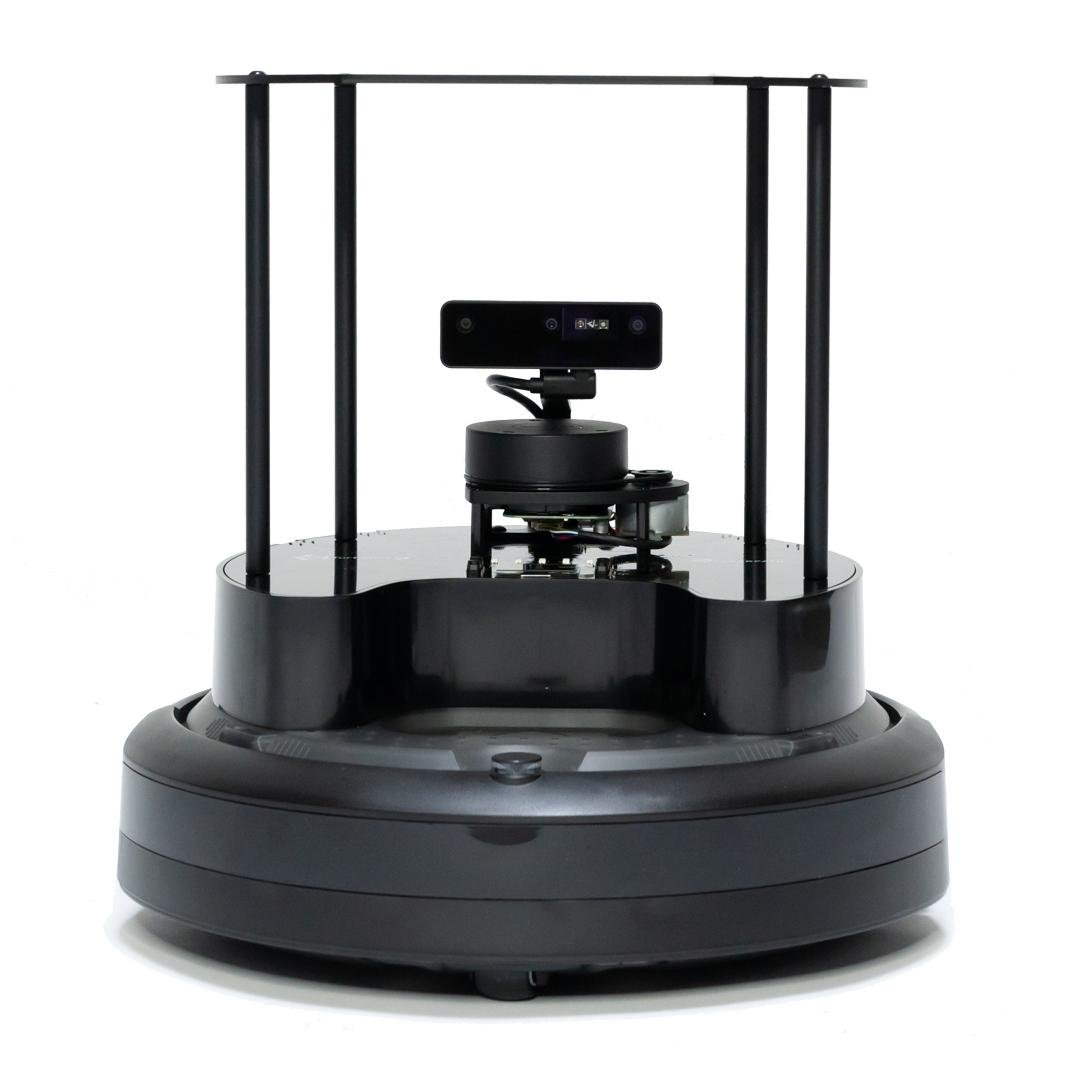
TurtleBot4 is the latest version of the TurtleBot series, designed as an affordable, ROS2-native mobile robot for education and research in robotics and autonomy. It builds on previous models with upgraded hardware, including a larger differential-drive base powered by an iRobot Create 3 platform, an onboard Raspberry Pi 4 computer, and improved sensors such as RPLIDAR A1 LiDAR, an OAK-D Pro depth camera, and integrated IMU and cliff sensors. TurtleBot4 supports SLAM, autonomous navigation, mapping, and multi-robot research while maintaining the series’ emphasis on modularity and open-source design. It has detailed documentation, and expansion options for additional sensors or manipulators, making it a flexible testbed for students and researchers working on robot perception, planning, and control.
The Robotics and Autonomy Lab currently maintains two TurtleBot4 units in the Standard configuration.
Location
E.A. Fernandez IDEA Factory (Bldg. 228), room 3119.Physical specifications
| Dimensions | 341 x 339 x 351 mm (13.4 x 13.3 x 13.8 in) |
| Weight | 3.9 kg (8.6 lbs) |
| Payload (max) | 9 kg (19.8 lbs) |
| Speed (max) | 0.31 m/s (1.02 ft/s) |
Important documents and useful links
- Turtlebot4 manual
- Quick start guide
- Gazebo simulation
- Github repository
Reservation
Turtlebot4 platform must be reserved before using. The reservation is done using the Google calendar (TBD). Users will be able to reserve the equipment personally after attending the RAL lab orientation and then getting trained on the equipment.
TBD
Video demonstration
The following videos demonstrate capabilities and the some aspects of operating Turtlebot4:Important reminders
- Leave the robot on the charging station when finished working with it.
- Operate the robots within a clearly marked area to minimize the risk of accidental physical contact with passersbys.
TBD
Shutting down procedures
- Stop ROS communication with the robot.
- Put the robot on the charging station.
Gaining access to equipment
Contact the lab manager (ipenskiy@umd.edu).